Cyber Salam Robots
2025-2026 (Decode Season)
This season asked for a shooter. Our first design implemented a magazine to intake and index each scoring element then transfer the ball to the shooter (outtake) mechanism. We completely redesigned the robot three times to improve reliability and performance.
V1 - Spindexer design
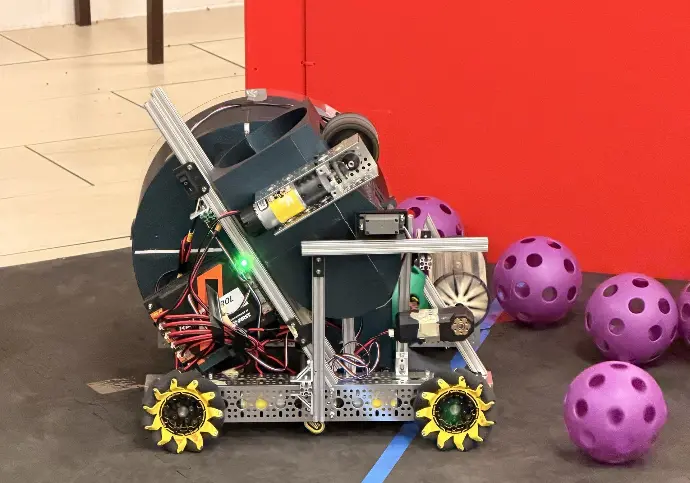
V2 - Based on Everybot design

V3 - Intake and Shoot design
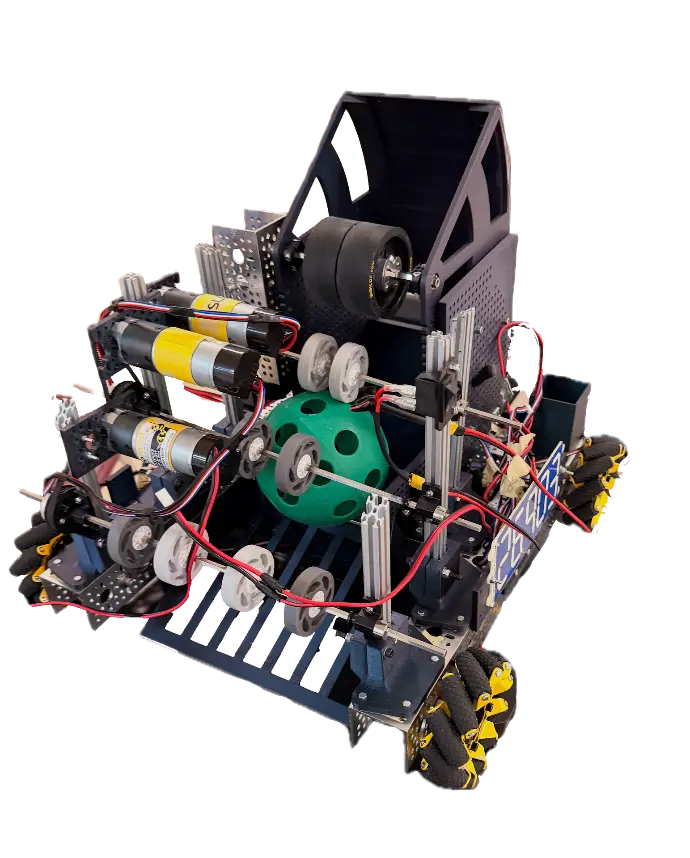
V2 - Based on Everybot design
V3 - Intake and Shoot design
2024-2025 (Into the Deep - Rookie Season)
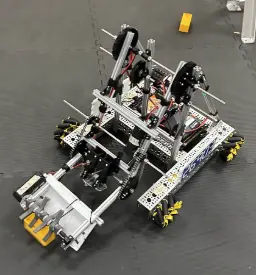
We started with starter kit from REV Robotics and chassis from GoBilda. This resulted in a basic claw for carrying specimen and an intake for picking up samples.
As we gained experience, we improved our claw to be more robust using 3D printed parts. We also improved intake mechanism several times. We changed the starter kit's intake to a claw. We later replaced the intake claw with an improve intake roller.